Multi-axle steering articulated
This script presents open-loop multi-axle steering of an articulated vehicle.

Contents
Simulation models and parameters
First, all classes of the package are imported with
clear ; close all ; clc import VehicleDynamicsLateral.*
Choosing tire and vehicle model. In this case, the parameters are defined by the user.
% Choosing tire TireModel = TirePacejka(); TireModel.a0 = 1; TireModel.a1 = 2; TireModel.a2 = 700; TireModel.a3 = 5000; TireModel.a4 = 80; TireModel.a5 = 0; TireModel.a6 = 0; TireModel.a7 = 0.6; % Choosing vehicle VehicleModel = VehicleArticulatedNonlinear(); VehicleModel.mF0 = 5200; VehicleModel.mR0 = 2400; VehicleModel.mF = 6000; VehicleModel.mR = 10000; VehicleModel.mM = 17000; VehicleModel.IT = 46000; VehicleModel.IS = 450000; VehicleModel.lT = 3.5; VehicleModel.lS = 7.7; VehicleModel.c = -0.3; VehicleModel.nF = 2; VehicleModel.nR = 4; VehicleModel.nM = 8; VehicleModel.wT = 2.6; VehicleModel.wS = 2.4; VehicleModel.muy = 0.8; VehicleModel.deltaf = 0; VehicleModel.deltar = 0; VehicleModel.deltam = 0; VehicleModel.Fxf = 0; VehicleModel.Fxr = 0; VehicleModel.Fxm = 0; % The System is completely defined once we atribute the chosen tire model % to the vehicle object. VehicleModel.tire = TireModel;
Simulation parameters
Choosing simulation time span
T = 11; % Total simulation time [s] resol = 80; % Resolution TSPAN = 0:T/resol:T; % Time span [s]
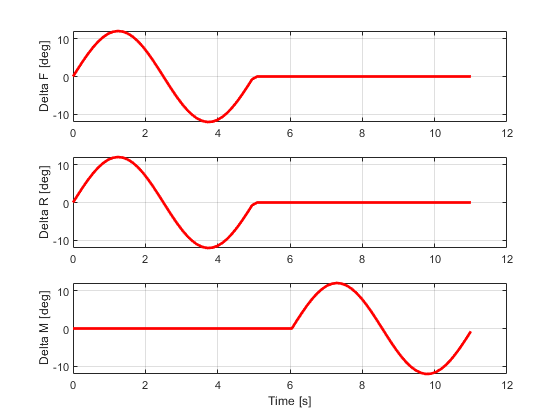
Open-loop steering input
Single period sine wave with:
delta_amplitude = 12*pi/180; % Steering input amplitude [rad] T_period = 5; % Steering single period [s] freq = 1/T_period; % Steering frequency [Hz] delta_freq = freq*2*pi; % Steering frequency [rad/s] % End input index sine_index = find(TSPAN > T_period); % Defining steering input VehicleModel.deltaf = [delta_amplitude*sin(delta_freq*TSPAN(1:sine_index(1)-1)) zeros(1,length(TSPAN)-sine_index(1)+1)]; VehicleModel.deltar = [delta_amplitude*sin(delta_freq*TSPAN(1:sine_index(1)-1)) zeros(1,length(TSPAN)-sine_index(1)+1)]; VehicleModel.deltam = [zeros(1,length(TSPAN)-sine_index(1)+1) delta_amplitude*sin(delta_freq*TSPAN(1:sine_index(1)-1))]; figure subplot(3,1,1) hold on ; grid on ; box on plot(TSPAN,VehicleModel.deltaf*180/pi,'r','linewidth',2) ylabel('Delta F [deg]') subplot(3,1,2) hold on ; grid on ; box on plot(TSPAN,VehicleModel.deltar*180/pi,'r','linewidth',2) ylabel('Delta R [deg]') subplot(3,1,3) hold on ; grid on ; box on plot(TSPAN,VehicleModel.deltam*180/pi,'r','linewidth',2) ylabel('Delta M [deg]') xlabel('Time [s]')
To define a simulation object (simulator) the arguments must be the vehicle object and the time span.
simulator = Simulator(VehicleModel, TSPAN);
Initial conditions Changing initial conditions of the simulation object
simulator.V0 = 40/3.6; % Initial velocity [m/s]
Run simulation
To simulate the system we run the Simulate method of the simulation object.
simulator.Simulate();
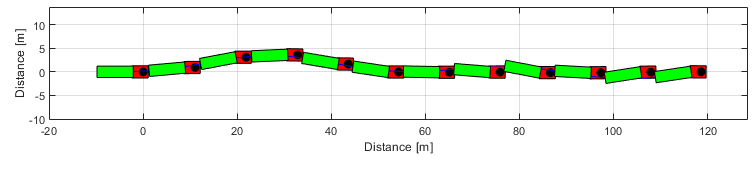
Results
g = Graphics(simulator); g.TractorColor = 'r'; g.SemitrailerColor = 'g'; g.Frame(); g.Animation(); % g.Animation('html/MultiaxleSteeringArticulated'); % Uncomment to save animation gif