Open-Loop Steering Simple
This example simulates a simple vehicle with an open loop sinusoidal steering input.

Contents
Simulation models and parameters
First, all classes of the package are imported with
clear ; close all ; clc import VehicleDynamicsLateral.*
Tire and vehicle model
Choosing tire and vehicle model. In this case, the parameters are defined by the user.
% Choosing tire TireModel = TirePacejka(); % Choosing vehicle System = VehicleSimpleNonlinear(); % Tire model and friction System.tire = TireModel; System.muy = 1.0;
Simulation parameters
Choosing simulation time span
T = 4; % Total simulation time [s] resol = 50; % Resolution TSPAN = 0:T/resol:T; % Time span [s]
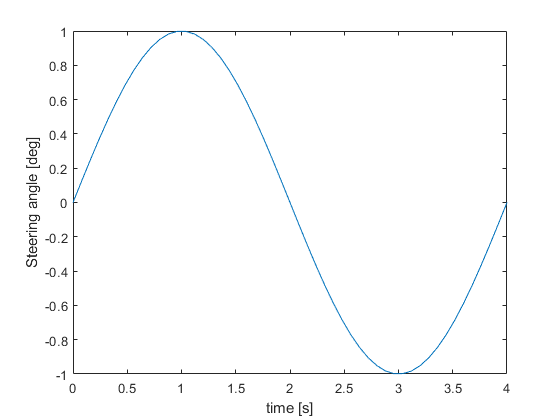
Open-loop steering input
Steering angle
System.deltaf = 1*pi/180*sin(T^-1*2*pi*TSPAN);
Run simulation
To define a simulation object (simulator) the arguments must be the vehicle object and the time span.
simulator = Simulator(System, TSPAN);
% Simulation
simulator.Simulate();
Results
% Retrieving states XT = simulator.XT; YT = simulator.YT; PSI = simulator.PSI; VEL = simulator.VEL; ALPHAT = simulator.ALPHAT; dPSI = simulator.dPSI; figure(1) plot(TSPAN,180/pi*System.deltaf) xlabel('time [s]') ylabel('Steering angle [deg]')
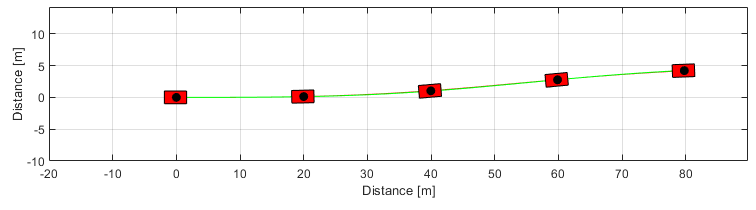
Frame and animation
g = Graphics(simulator); g.TractorColor = 'r'; g.Frame(); g.Animation(); % g.Animation('html/OpenLoopSteeringSimple'); % Uncomment to save animation gif