Template 2DOF
This template shows how to simulate a quarter car model and plot the results.
Contents
Simulation models and parameters
First, all classes of the package are imported with
clear ; close all ; clc import VehicleDynamicsVertical.*
Choosing vehicle model.
% Choosing vehicle
VehicleModel = VehicleModel2DOF();
Choosing simulation time span
T = 4; % Total simulation time [s] resol = 500; % Resolution TSPAN = 0:T/resol:T; % Time span [s]
To define a simulation object (simulator) the arguments must be the vehicle object and the time span.
simulator = Simulator(VehicleModel, TSPAN);
Run simulation
To simulate the system we run the Simulate method of the simulation object.
simulator.Simulate();
Results
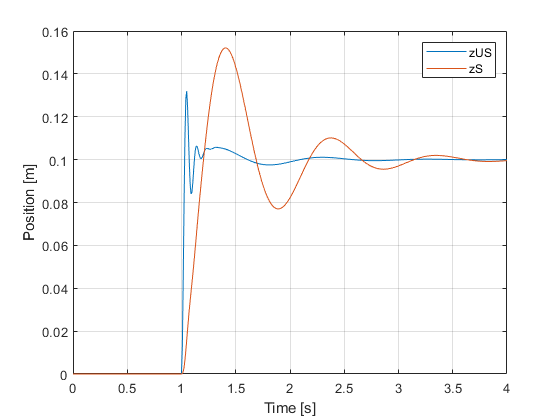
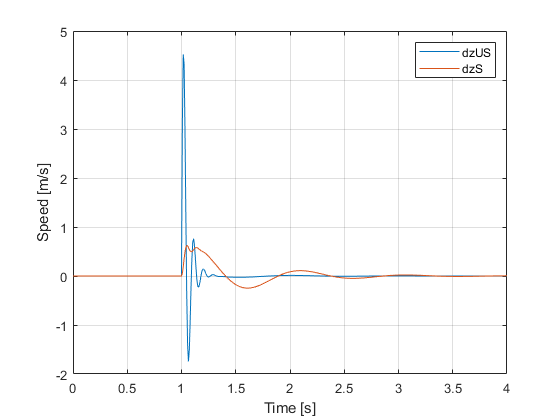
The time series of each state is stored in separate variables. Retrieving states
zUS = simulator.zUS; dzUS = simulator.dzUS; zS = simulator.zS; dzS = simulator.dzS;
Plotting the states
figure hold on ; grid on ; box on plot(TSPAN,zUS) plot(TSPAN,zS) xlabel('Time [s]') ylabel('Position [m]') legend('zUS','zS') figure hold on ; grid on ; box on plot(TSPAN,dzUS) plot(TSPAN,dzS) xlabel('Time [s]') ylabel('Speed [m/s]') legend('dzUS','dzS')